This class describes a 3D Snow graph. More...
#include <GPM_3DSnowGraph.h>
Public Member Functions | |
| tBoolean | createPatternFunctions (SV::GPM_PatternFunction &patternFunctions) const |
| create the date for rewriting graph More... | |
| virtual void | patternsMappingSignalEmit (const SVC::GPM_PatternFunction patternFunction, const vector< vector< vector< tVertexIID > > > &fmappings) const |
| signal emmiting when the matching of patterns is done More... | |
| SP::GPM_PortGraph | createPatternGraph (const int &eps, int idv[4], int idp[3][3]) const |
| create a pattern graph More... | |
| SP::GPM_PortGraph | createTransformerGraph (int idcp[3][2]) const |
| create a transformer graph More... | |
| void | createGraph (const int &index) |
| create an initial graph More... | |
| SP::GPM_Snow3DFunction | createPatternFunction (SP::GPM_PortGraph pattern, SP::GPM_PortGraph transformer, const int pattern_idv[3], const int pattern_idp[3][3], const int transformer_idcp[3][2]) const |
| create pattern function More... | |
Static Public Member Functions | |
| static SP::GPM_3DSnowGraph | New () |
| create a test class More... | |
Protected Member Functions | |
| GPM_3DSnowGraph (void) | |
| create More... | |
| virtual | ~GPM_3DSnowGraph (void) |
| destroy More... | |
Detailed Description
This class describes a 3D Snow graph.
- Version
- 1.0
A snow flake 3D example consists in replacing a triangle by a tetrahedron thanks to 2 rules described as folow (the state of ports is undefined by default. It may be either + or -):
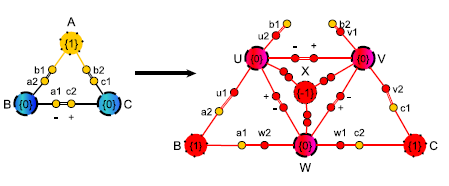
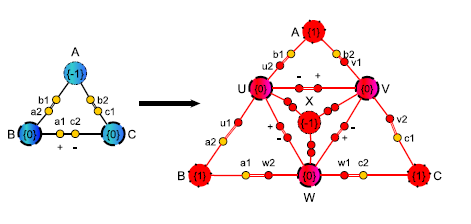
The coordinates of the new nodes U,V,W,X are described as follow:
- X=(1/3).(A+B+C)+eps.(sqrt(2)/6).AB^AC where eps=1 if state of node A is 1 or eps=-1 if the state of node A is -1
- U=(1/2)(A+B)
- V=(1/2)(A+C)
- W=(1/2)(B+C)
The rules are as follow:
- erase edges [a2,b1],[b2,c1],[a1,c2]
- add edges [a2,u1],[u2,b1],[b2,v1],[v2,c1],[w1,c2],w2,a1]
- modify the states of nodes A,B,C
The large graph is a tetrahedron with contains :
- 4 nodes A(0,0,-sqrt(2)/sqrt(3)) B(1/2,sqrt(3)/6,0) C(-1/2,sqrt(3)/6,0) D(0,-sqrt(3)/3),0)
- 12 ports (qb,qc,qd,ra,rc(-),rd(+),pa,pb(+),pd(-),ta,tb(-),tc(+))
- 18 edges [A,qb],[A,qc],[A,qd],[B,ra],[B,rc],[B,rd],[C,pa],[C,pb],[C,pd],[D,ta],[D,tb],[D,tc], [qb,ra],[qc,pa],[qd,ta],[ra,pb],[rc,pb],[rd,tb]
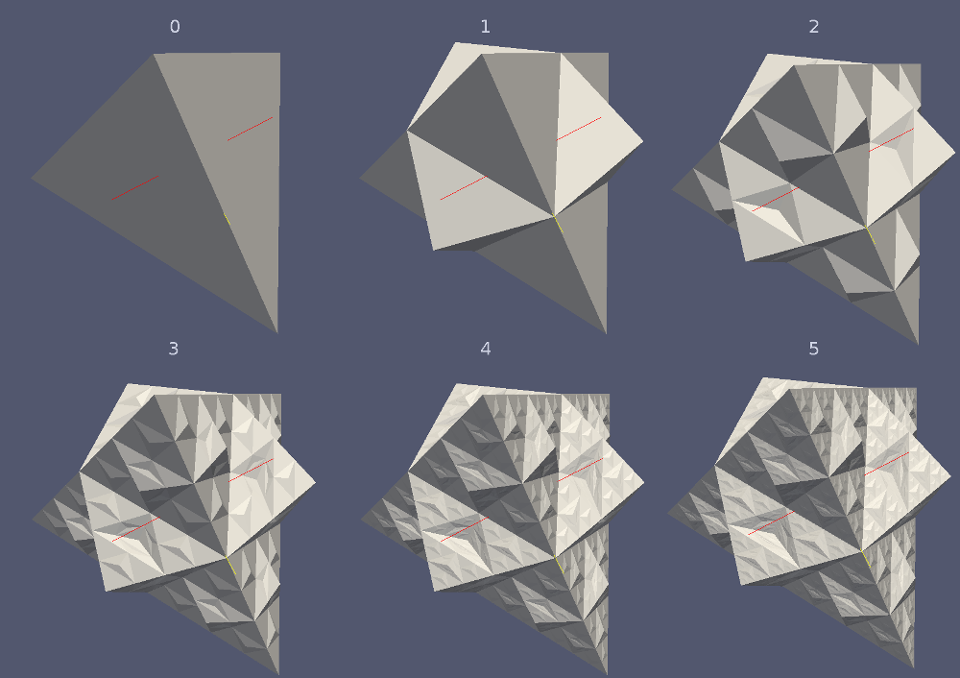
The results obtain after 5 iterations is given as follow:
To simulate this example, 2 classes have to been created:
- GPM_3DSnowGraph to generate graphs
- GPM_Snow3DFunction to define rules
The GPM_3DSnowGraph::createPatternFunctions create the 2 functions with 2 differents patterns and with the same transformer graph with the same rules.
The rules consist in
- removing 3 edges from mapped pattern graph,
- adding 6 edges from mapped pattern graph to new copy of transformer graph in large graph
- setting the group name of mapped pattern nodes
To update the coordinates of the copied transformer graph is done by specializing the method GPM_PatternFunction::updateTransformerStates
To update the pattern node state, do it with trigger action:
tBoolean GPM_Snow3DFunction::updatePatternGraphStates(GPM_Graph& largeGraph, const vector<tVertexIID>& mappingP2L,CORE_Out& io) { tBoolean succeeds=true; GPM_Node cnode=null; cnode=dynamic_cast<GPM_Node>(largeGraph.getVertex(mappingP2L[0]).get()); if (cnode==null) return false; succeeds= succeeds && cnode->setTriggerAction(cnode->SET,"state",1);
cnode=dynamic_cast<GPM_Node*>(largeGraph.getVertex(mappingP2L[1]).get()); if (cnode==null) return false; succeeds = succeeds && cnode->setTriggerAction(cnode->SET,"state",1);
cnode=dynamic_cast<GPM_Node*>(largeGraph.getVertex(mappingP2L[2]).get()); if (cnode==null) return false; succeeds = succeeds && cnode->setTriggerAction(cnode->SET,"state",1); return succeeds;
} Creating pattern graph (or similarly transformer graph) is as follow:
Constructor & Destructor Documentation
|
protected |

|
protectedvirtual |
destroy
Member Function Documentation
| void GPM_3DSnowGraph::createGraph | ( | const int & | index | ) |
create an initial graph
| SP::GPM_Snow3DFunction GPM_3DSnowGraph::createPatternFunction | ( | SP::GPM_PortGraph | pattern, |
| SP::GPM_PortGraph | transformer, | ||
| const int | pattern_idv[3], | ||
| const int | pattern_idp[3][3], | ||
| const int | transformer_idcp[3][2] | ||
| ) | const |
create pattern function
References GPM_Snow3DFunction::New().
Referenced by createPatternFunctions().


| tBoolean GPM_3DSnowGraph::createPatternFunctions | ( | SV::GPM_PatternFunction & | patternFunctions | ) | const |
create the date for rewriting graph
References createPatternFunction(), createPatternGraph(), createTransformerGraph(), and tBoolean.

| SP::GPM_PortGraph GPM_3DSnowGraph::createPatternGraph | ( | const int & | eps, |
| int | idv[4], | ||
| int | idp[3][3] | ||
| ) | const |
create a pattern graph
References GPM_PortGraph::New().
Referenced by createPatternFunctions().


| SP::GPM_PortGraph GPM_3DSnowGraph::createTransformerGraph | ( | int | idcp[3][2] | ) | const |
create a transformer graph
References GPM_PortGraph::New().
Referenced by createPatternFunctions().


|
inlinestatic |

|
virtual |
signal emmiting when the matching of patterns is done
References null.
The documentation for this class was generated from the following files:
